0708-1300/Class notes for Thursday, October 4: Difference between revisions
No edit summary |
m (→Theorem) |
||
| (5 intermediate revisions by the same user not shown) | |||
| Line 5: | Line 5: | ||
==Class Notes== |
==Class Notes== |
||
<span style="color: red;">The notes below are by the students and for the students. Hopefully they are useful, but they come with no guarantee of any kind.</span> |
|||
<p>During the previous class, we discussed immersions---smooth maps whose differentials are injective. This class deals with the dual notion of submersions, defined as follows:</p> |
|||
===Definition=== |
===Definition=== |
||
Let <math>\theta : M^m \rightarrow N^n\!</math> be a smooth map between manifolds. If for each <math>p \in M\!</math> the differential <math>d\theta_p : T_p M \rightarrow T_{\theta(p)} N\!</math> is surjective, <math>\theta\!</math> is called a <b>submersion</b>. |
<p>Let <math>\theta : M^m \rightarrow N^n\!</math> be a smooth map between manifolds. If for each <math>p \in M\!</math> the differential <math>d\theta_p : T_p M \rightarrow T_{\theta(p)} N\!</math> is surjective, <math>\theta\!</math> is called a <b>submersion</b>. </p> |
||
===Remarks=== |
|||
<p>We had previously seen that immersions induce "nice" coordinate charts---ones where the immersion looks like the canonical inclusion <math>\iota:\mathbb{R}^m\rightarrow\mathbb{R}^n</math> (where <math>n \ge m\!</math>). The proof of this theorem made use of the Inverse Function Theorem on a function defined on a chart of <math>N\!</math>. In the case of submersions, there is a similar theorem. Submersions locally look like the canonical projection <math>\pi : \mathbb{R}^m = \mathbb{R}^n \times \mathbb{R}^{m-n} \rightarrow \mathbb{R}^n\!</math>, and the proof of this fact makes use of the Inverse Function Theorem for a function define on a chart of <math>M\!</math> (duality!). However, before we can prove this theorem, we will need the following lemma.</p> |
|||
===Lemma=== |
|||
<p> Let <math>V\!</math> and <math>W\!</math> be finite-dimensional vector spaces over <math>\mathbb{R}\!</math> and let <math>T:V \rightarrow W \!</math> be a surjective linear map. Then there exist bases <math>v=\{v_1,\ldots,v_m\}\!</math> for <math>V\!</math> and <math>w=\{w_1,\ldots,w_n\}\!</math> for <math>W\!</math> such that the matrix representative of <math>T\!</math> with respect to <math>v\!</math> and <math>w\!</math> is that of the canonical projection <math>\pi : \mathbb{R}^m \rightarrow \mathbb{R}^n\!</math>.</p> |
|||
====Proof==== |
|||
<p>Let <math>w=\{w_1,\ldots,w_n\}\!</math> be any basis for <math>W\!</math> and choose <math>\{v_1,\ldots,v_n\} \subset V\!</math> such that <math>T(v_i)=w_i\!</math> for each <math>i\in\{1,\ldots,n\}\!</math> (this may be done since <math>T\!</math> is surjective). We claim that the set <math>v' = \{v_1,\ldots,v_n\} \subset V\!</math> is linearly independent. Suppose it were not. Then there would exist <math>\{c_1,\ldots,c_n\} \subset \mathbb{R}\!</math> with <math>\sum_{i=1}^n c_i v_i = 0\!</math> and <math>c_i \ne 0\!</math> for some <math>i\in\{1,\ldots,n\}\!</math>. But then <math>0 = T\left(\sum_{i=1}^n c_i v_i\right) = \sum_{i=1}^n c_i T\left( v_i\right) = \sum_{i=1}^n c_i w_i\!</math> by linearity of <math>T\!</math>, contradicting the assumption that <math>w\!</math> is a basis.</p> |
|||
<br> |
|||
<p> Note that <math>\mathrm{dim}(\mathrm{ker}(T)) = m-n\!</math>. Hence we may find a basis <math>v'' = \{v_{n+1},\ldots,v_m\} \subset V\!</math> for <math>\mathrm{ker}(T)\!</math>. Since <math>\mathrm{span}(v') \cap \mathrm{ker}(T) = \{0 \in V\}\!</math>, the set <math>v = v' \cup v''</math> must be linearly independent and hence form a basis for <math>V\!</math>. We then have <math>w_i = \sum_{i=j}^m \delta_{ij} T(v_j)\!</math>, so that the matrix representative of <math>T\!</math> is <math>\left( I_{n \times n} | 0_{n \times (m-n)} \right)\!</math>, which is the matrix representative of <math>\pi\!</math>. <math>\Box\!</math></p> |
|||
===Theorem=== |
===Theorem=== |
||
If <math>\theta : M^m \rightarrow N^n\!</math> is a smooth map between manifolds and for some <math>p \in M\!</math> the differential <math>d\theta_p : T_p M \rightarrow T_{\theta(p)} N\!</math> is surjective then there exist charts <math>\phi : U \rightarrow U' \subset \mathbb{R}^m\!</math> and <math>\psi : V \rightarrow V' \subset \mathbb{R}^n\!</math> on <math>M\!</math> and <math>N\!</math> respectively such that |
<p>If <math>\theta : M^m \rightarrow N^n\!</math> is a smooth map between manifolds and for some <math>p \in M\!</math> the differential <math>d\theta_p : T_p M \rightarrow T_{\theta(p)} N\!</math> is surjective then there exist charts <math>\phi : U \rightarrow U' \subset \mathbb{R}^m\!</math> and <math>\psi : V \rightarrow V' \subset \mathbb{R}^n\!</math> on <math>M\!</math> and <math>N\!</math>, respectively, such that</p> |
||
<ol> |
<ol> |
||
| Line 21: | Line 35: | ||
====Proof==== |
====Proof==== |
||
<p>Since translations are diffeomorphisms of <math>\mathbb{R}^k\!</math> for every <math>k \in \mathbb{N}\!</math>, it is trivial to find charts <math>\phi_0 : U_0 \rightarrow U_0' \subset \mathbb{R}^m\!</math> and <math>\psi : V \rightarrow V' \subset \mathbb{R}^m\!</math> such that <math>\phi(p) = 0 \in \mathbb{R}^m\!</math> and <math>\psi(\theta(p)) = 0 \in \mathbb{R}^n\!</math>. Furthermore, <math>V\!</math> is open, <math>U_0\!</math> is open and <math>\theta\!</math> is continuous, so <math>U_0 \cap \theta^{-1}\left(V\right) \subset M\!</math> is open and contains <math>p\!</math>. Hence, we may assume <math>U_0 \subset \theta^{-1}\left(V\right)\!</math> without loss of generality.</p> |
|||
<br> |
|||
<p>Let <math>\theta_0 = \psi \circ \theta \circ \phi_0^{-1} : U_0' \rightarrow V'\!</math> be the local representative of <math>\theta\!</math> and let <math>D_0 : \mathbb{R}^m \rightarrow \mathbb{R}^n \!</math> be the local representative of <math>d\theta_p\!</math>. Since <math>d\theta_p\!</math> is onto, we may apply the previous lemma to obtain a change of coordinates <math>T : \mathbb{R}^m \rightarrow \mathbb{R}^m</math> such that <math>D_0 = \pi \circ T</math>. </p> |
|||
<br> |
|||
<p>Let <math>\phi_1 = T \circ \phi_0\! : U_0 \rightarrow U_1' \subset \mathbb{R}^m</math>. Then <math>\phi_1\!</math> is a chart because <math>T\!</math> is a diffeomorphism. Let <math>\theta_1 = \psi \circ \theta \circ \phi_1^{-1} : U_1' \rightarrow V'\!</math> be the corresponding local representative, define <math>\zeta : U_1' \rightarrow \mathbb{R}^m\!</math> by <math>\zeta(x,y) = (\theta_1(x,y),y)\!</math>, and let <math>D_1 : \mathbb{R}^m \rightarrow \mathbb{R}^n\!</math> be the differential of <math>\theta_1\!</math> at <math>0\!</math>. Then, by construction of <math>T\!</math>, we have that <math>D_1 = \pi\!</math> and hence <math>d \zeta_0 = \mathrm{id}_{\mathbb{R}^m}\!</math>, which is invertible. Hence, the Inverse Function Theorem gives the existence of non-empty open set <math>U' \subset \zeta(U_1')\!</math> such that <math>\zeta|_{\zeta^{-1}(U')}\!</math> is a diffeomorphism. Put <math>U = \phi_1^{-1}(\zeta^{-1}(U'))\!</math> and <math>\phi = \zeta \circ \phi_1|_U\!</math>. Then <math>\phi\!</math> is a chart.</p> |
|||
<br> |
|||
<p>It remains to check that <math>\pi \circ \phi = \psi \circ \theta|_U\!</math>, but this is clear: if <math>\phi_1(q)=(x,y)\!</math> for some <math>q \in U\!</math>, then <math>\pi\circ\phi(q) = \pi\circ\zeta(x,y) = \theta_1(x,y) = \psi(\theta(q))\!</math> by definition of <math>\theta_1\!</math>. Hence, <math>\pi \circ \phi = \psi \circ \theta|_U\!</math> and the proof is complete.<math>\Box\!</math> |
|||
Latest revision as of 13:58, 8 October 2007
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

Movie Time
With the word "immersion" in our minds, we watch the movie "Outside In". Also see the movie's home, a talk I once gave, and the movie itself, on google video.
Class Notes
The notes below are by the students and for the students. Hopefully they are useful, but they come with no guarantee of any kind.
During the previous class, we discussed immersions---smooth maps whose differentials are injective. This class deals with the dual notion of submersions, defined as follows:
Definition
Let [math]\displaystyle{ \theta : M^m \rightarrow N^n\! }[/math] be a smooth map between manifolds. If for each [math]\displaystyle{ p \in M\! }[/math] the differential [math]\displaystyle{ d\theta_p : T_p M \rightarrow T_{\theta(p)} N\! }[/math] is surjective, [math]\displaystyle{ \theta\! }[/math] is called a submersion.
Remarks
We had previously seen that immersions induce "nice" coordinate charts---ones where the immersion looks like the canonical inclusion [math]\displaystyle{ \iota:\mathbb{R}^m\rightarrow\mathbb{R}^n }[/math] (where [math]\displaystyle{ n \ge m\! }[/math]). The proof of this theorem made use of the Inverse Function Theorem on a function defined on a chart of [math]\displaystyle{ N\! }[/math]. In the case of submersions, there is a similar theorem. Submersions locally look like the canonical projection [math]\displaystyle{ \pi : \mathbb{R}^m = \mathbb{R}^n \times \mathbb{R}^{m-n} \rightarrow \mathbb{R}^n\! }[/math], and the proof of this fact makes use of the Inverse Function Theorem for a function define on a chart of [math]\displaystyle{ M\! }[/math] (duality!). However, before we can prove this theorem, we will need the following lemma.
Lemma
Let [math]\displaystyle{ V\! }[/math] and [math]\displaystyle{ W\! }[/math] be finite-dimensional vector spaces over [math]\displaystyle{ \mathbb{R}\! }[/math] and let [math]\displaystyle{ T:V \rightarrow W \! }[/math] be a surjective linear map. Then there exist bases [math]\displaystyle{ v=\{v_1,\ldots,v_m\}\! }[/math] for [math]\displaystyle{ V\! }[/math] and [math]\displaystyle{ w=\{w_1,\ldots,w_n\}\! }[/math] for [math]\displaystyle{ W\! }[/math] such that the matrix representative of [math]\displaystyle{ T\! }[/math] with respect to [math]\displaystyle{ v\! }[/math] and [math]\displaystyle{ w\! }[/math] is that of the canonical projection [math]\displaystyle{ \pi : \mathbb{R}^m \rightarrow \mathbb{R}^n\! }[/math].
Proof
Let [math]\displaystyle{ w=\{w_1,\ldots,w_n\}\! }[/math] be any basis for [math]\displaystyle{ W\! }[/math] and choose [math]\displaystyle{ \{v_1,\ldots,v_n\} \subset V\! }[/math] such that [math]\displaystyle{ T(v_i)=w_i\! }[/math] for each [math]\displaystyle{ i\in\{1,\ldots,n\}\! }[/math] (this may be done since [math]\displaystyle{ T\! }[/math] is surjective). We claim that the set [math]\displaystyle{ v' = \{v_1,\ldots,v_n\} \subset V\! }[/math] is linearly independent. Suppose it were not. Then there would exist [math]\displaystyle{ \{c_1,\ldots,c_n\} \subset \mathbb{R}\! }[/math] with [math]\displaystyle{ \sum_{i=1}^n c_i v_i = 0\! }[/math] and [math]\displaystyle{ c_i \ne 0\! }[/math] for some [math]\displaystyle{ i\in\{1,\ldots,n\}\! }[/math]. But then [math]\displaystyle{ 0 = T\left(\sum_{i=1}^n c_i v_i\right) = \sum_{i=1}^n c_i T\left( v_i\right) = \sum_{i=1}^n c_i w_i\! }[/math] by linearity of [math]\displaystyle{ T\! }[/math], contradicting the assumption that [math]\displaystyle{ w\! }[/math] is a basis.
Note that [math]\displaystyle{ \mathrm{dim}(\mathrm{ker}(T)) = m-n\! }[/math]. Hence we may find a basis [math]\displaystyle{ v'' = \{v_{n+1},\ldots,v_m\} \subset V\! }[/math] for [math]\displaystyle{ \mathrm{ker}(T)\! }[/math]. Since [math]\displaystyle{ \mathrm{span}(v') \cap \mathrm{ker}(T) = \{0 \in V\}\! }[/math], the set [math]\displaystyle{ v = v' \cup v'' }[/math] must be linearly independent and hence form a basis for [math]\displaystyle{ V\! }[/math]. We then have [math]\displaystyle{ w_i = \sum_{i=j}^m \delta_{ij} T(v_j)\! }[/math], so that the matrix representative of [math]\displaystyle{ T\! }[/math] is [math]\displaystyle{ \left( I_{n \times n} | 0_{n \times (m-n)} \right)\! }[/math], which is the matrix representative of [math]\displaystyle{ \pi\! }[/math]. [math]\displaystyle{ \Box\! }[/math]
Theorem
If [math]\displaystyle{ \theta : M^m \rightarrow N^n\! }[/math] is a smooth map between manifolds and for some [math]\displaystyle{ p \in M\! }[/math] the differential [math]\displaystyle{ d\theta_p : T_p M \rightarrow T_{\theta(p)} N\! }[/math] is surjective then there exist charts [math]\displaystyle{ \phi : U \rightarrow U' \subset \mathbb{R}^m\! }[/math] and [math]\displaystyle{ \psi : V \rightarrow V' \subset \mathbb{R}^n\! }[/math] on [math]\displaystyle{ M\! }[/math] and [math]\displaystyle{ N\! }[/math], respectively, such that
- [math]\displaystyle{ \phi(p) = 0\! }[/math]
- [math]\displaystyle{ \psi\left(\theta(p)\right) = 0\! }[/math]
- The diagram
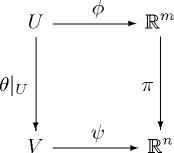
commutes, where [math]\displaystyle{ \pi : \mathbb{R}^m = \mathbb{R}^n \times \mathbb{R}^{m-n} \rightarrow \mathbb{R}^n\! }[/math] is the canonical projection.

Proof
Since translations are diffeomorphisms of [math]\displaystyle{ \mathbb{R}^k\! }[/math] for every [math]\displaystyle{ k \in \mathbb{N}\! }[/math], it is trivial to find charts [math]\displaystyle{ \phi_0 : U_0 \rightarrow U_0' \subset \mathbb{R}^m\! }[/math] and [math]\displaystyle{ \psi : V \rightarrow V' \subset \mathbb{R}^m\! }[/math] such that [math]\displaystyle{ \phi(p) = 0 \in \mathbb{R}^m\! }[/math] and [math]\displaystyle{ \psi(\theta(p)) = 0 \in \mathbb{R}^n\! }[/math]. Furthermore, [math]\displaystyle{ V\! }[/math] is open, [math]\displaystyle{ U_0\! }[/math] is open and [math]\displaystyle{ \theta\! }[/math] is continuous, so [math]\displaystyle{ U_0 \cap \theta^{-1}\left(V\right) \subset M\! }[/math] is open and contains [math]\displaystyle{ p\! }[/math]. Hence, we may assume [math]\displaystyle{ U_0 \subset \theta^{-1}\left(V\right)\! }[/math] without loss of generality.
Let [math]\displaystyle{ \theta_0 = \psi \circ \theta \circ \phi_0^{-1} : U_0' \rightarrow V'\! }[/math] be the local representative of [math]\displaystyle{ \theta\! }[/math] and let [math]\displaystyle{ D_0 : \mathbb{R}^m \rightarrow \mathbb{R}^n \! }[/math] be the local representative of [math]\displaystyle{ d\theta_p\! }[/math]. Since [math]\displaystyle{ d\theta_p\! }[/math] is onto, we may apply the previous lemma to obtain a change of coordinates [math]\displaystyle{ T : \mathbb{R}^m \rightarrow \mathbb{R}^m }[/math] such that [math]\displaystyle{ D_0 = \pi \circ T }[/math].
Let [math]\displaystyle{ \phi_1 = T \circ \phi_0\! : U_0 \rightarrow U_1' \subset \mathbb{R}^m }[/math]. Then [math]\displaystyle{ \phi_1\! }[/math] is a chart because [math]\displaystyle{ T\! }[/math] is a diffeomorphism. Let [math]\displaystyle{ \theta_1 = \psi \circ \theta \circ \phi_1^{-1} : U_1' \rightarrow V'\! }[/math] be the corresponding local representative, define [math]\displaystyle{ \zeta : U_1' \rightarrow \mathbb{R}^m\! }[/math] by [math]\displaystyle{ \zeta(x,y) = (\theta_1(x,y),y)\! }[/math], and let [math]\displaystyle{ D_1 : \mathbb{R}^m \rightarrow \mathbb{R}^n\! }[/math] be the differential of [math]\displaystyle{ \theta_1\! }[/math] at [math]\displaystyle{ 0\! }[/math]. Then, by construction of [math]\displaystyle{ T\! }[/math], we have that [math]\displaystyle{ D_1 = \pi\! }[/math] and hence [math]\displaystyle{ d \zeta_0 = \mathrm{id}_{\mathbb{R}^m}\! }[/math], which is invertible. Hence, the Inverse Function Theorem gives the existence of non-empty open set [math]\displaystyle{ U' \subset \zeta(U_1')\! }[/math] such that [math]\displaystyle{ \zeta|_{\zeta^{-1}(U')}\! }[/math] is a diffeomorphism. Put [math]\displaystyle{ U = \phi_1^{-1}(\zeta^{-1}(U'))\! }[/math] and [math]\displaystyle{ \phi = \zeta \circ \phi_1|_U\! }[/math]. Then [math]\displaystyle{ \phi\! }[/math] is a chart.
It remains to check that [math]\displaystyle{ \pi \circ \phi = \psi \circ \theta|_U\! }[/math], but this is clear: if [math]\displaystyle{ \phi_1(q)=(x,y)\! }[/math] for some [math]\displaystyle{ q \in U\! }[/math], then [math]\displaystyle{ \pi\circ\phi(q) = \pi\circ\zeta(x,y) = \theta_1(x,y) = \psi(\theta(q))\! }[/math] by definition of [math]\displaystyle{ \theta_1\! }[/math]. Hence, [math]\displaystyle{ \pi \circ \phi = \psi \circ \theta|_U\! }[/math] and the proof is complete.[math]\displaystyle{ \Box\! }[/math]