refresh
panel
Managed by
dbnvp:
Click the "h:mm:ss" links on the right panel to jump to a specific video time.
0:25:46
[
add]
Handout view 13: Iterated convolutions
0:26:12
[
add]
Handout view 13: Iterated convolutions
0:26:40
[
add]
Handout view 13: Iterated convolutions
0:27:02
[
add]
Handout view 13: Iterated convolutions
0:28:02
[
add]
Handout view 13: Iterated convolutions
0:29:16
[
add]
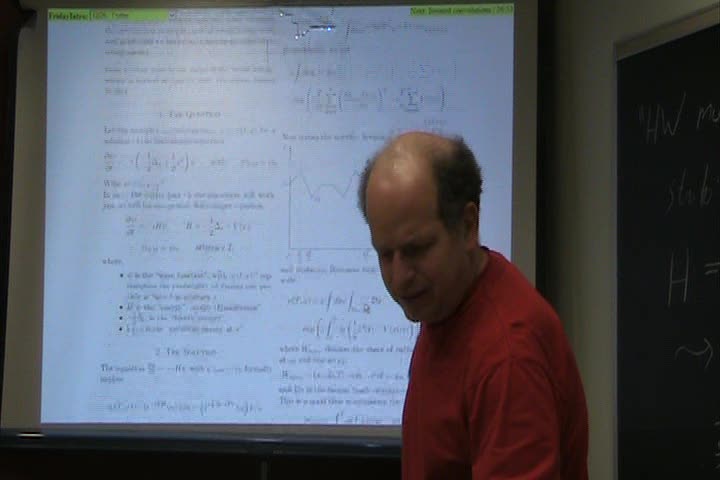
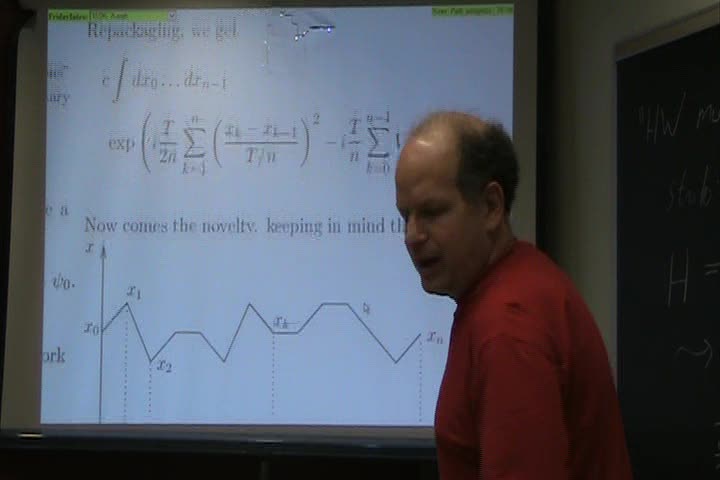
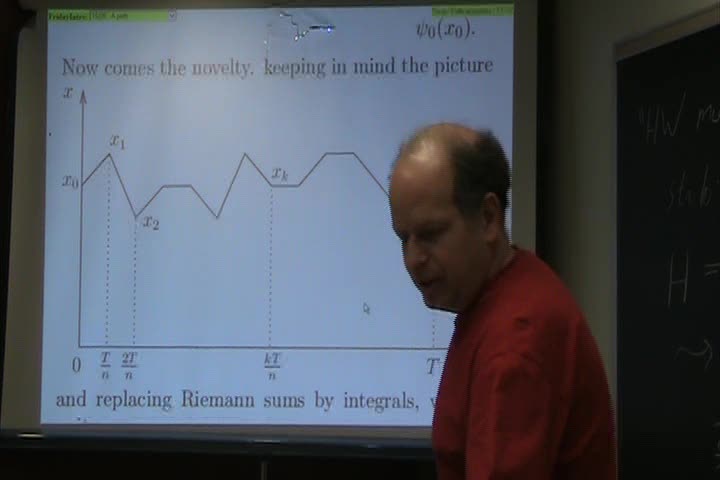
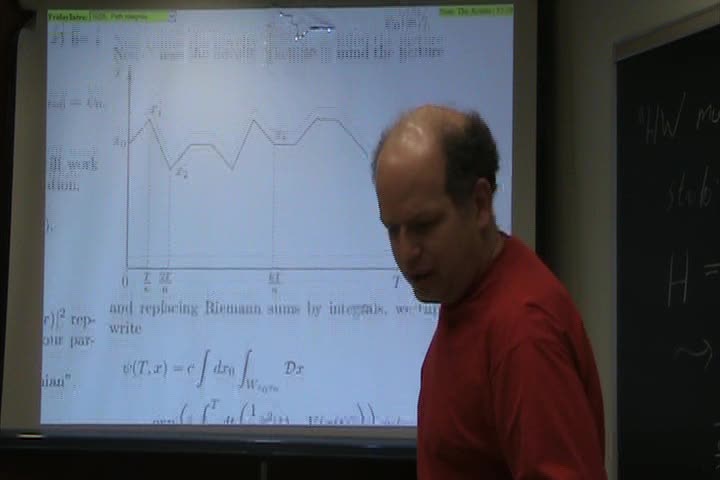
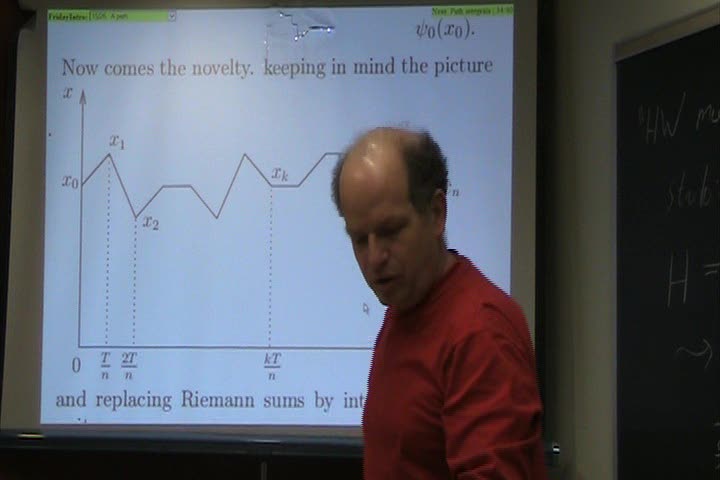
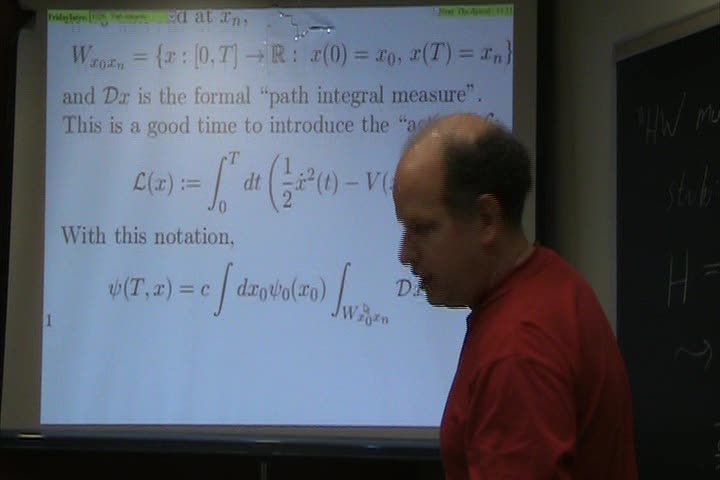
Handout view 14: Discrete path integral
0:29:33
[
add]
Handout view 13: Iterated convolutions
0:29:44
[
add]
Handout view 14: Discrete path integral
0:31:52
[
add]
Handout view 14: Discrete path integral
0:46:53
[
add]
Handout view 19: Rid of Path Integrals